Be Anywhere
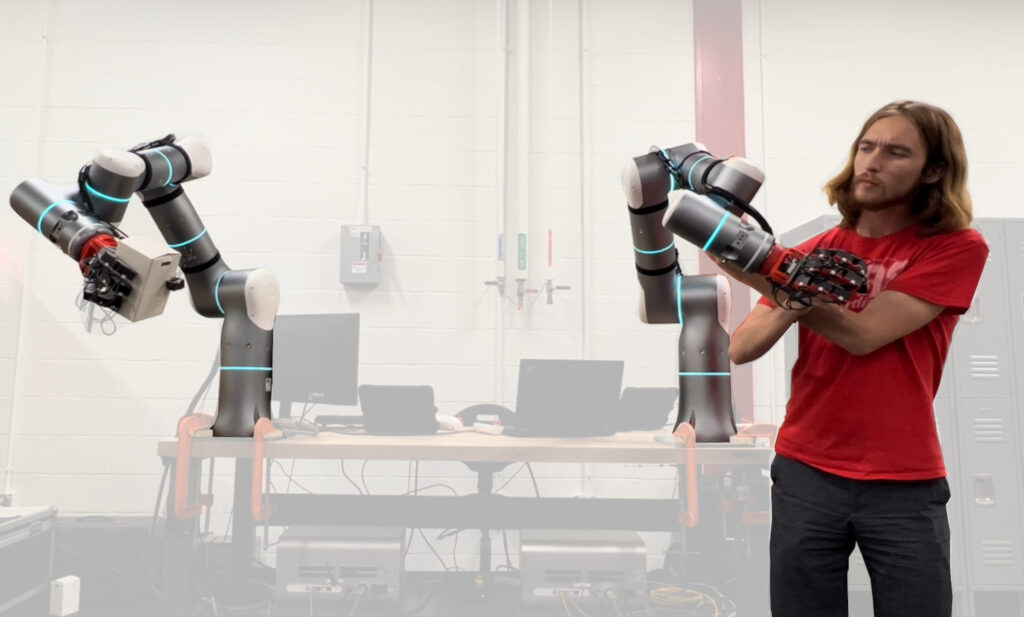
[1] “Wearing a Robotic Hand to Feel 3D Force Feedback: Analysis and Virtual Reality Application of the Hand-in-Hand System,”
(IROS 2025)
“Towards Torque-Driven Reinforcement Learning for Quadruped Locomotion,”
(SII 2025)
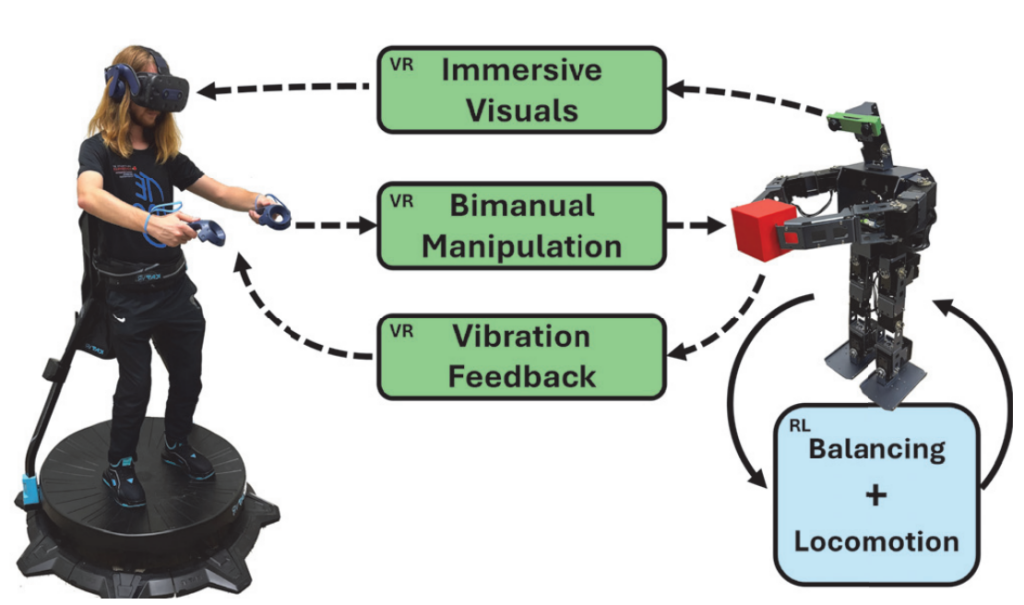
“Towards Miniature Humanoid Tele-Loco-Manipulation Using Virtual Reality and Reinforcement Learning,”
(Humanoids 2025)
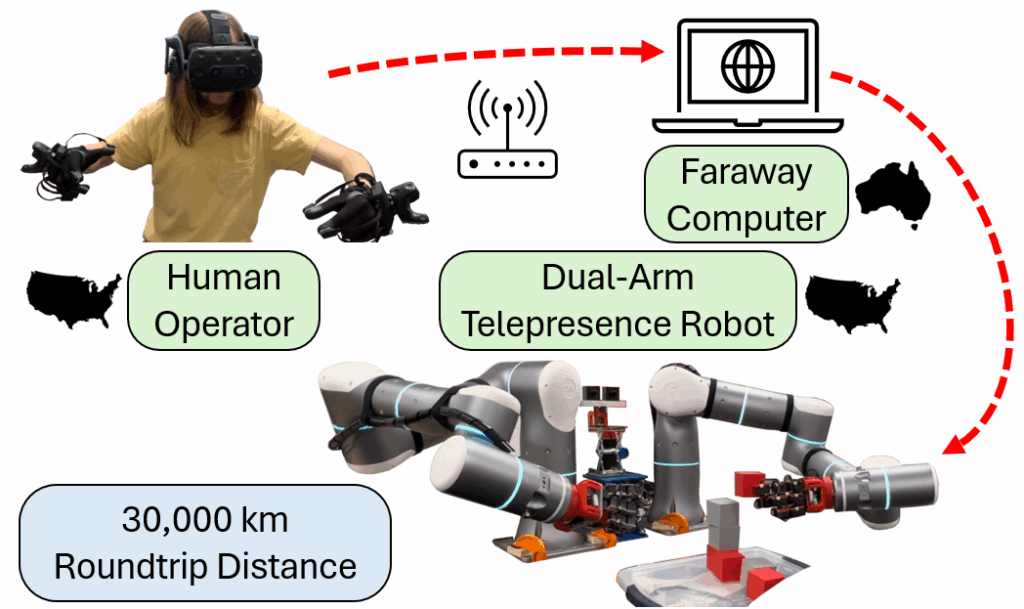
“A Virtual Reality Framework for Safe Global Bimanual Telepresence,”
(CASE 2025)
“Isaac Sim-to-Real: Reinforcement Learning based Locomotion for Quadrupeds,”
“Humans and Robots, Hand-in-Hand: Using Bilateral Telepresence to turn Robotic Hands into Wearable Haptic Exoskeletons,”
(UR 2025)
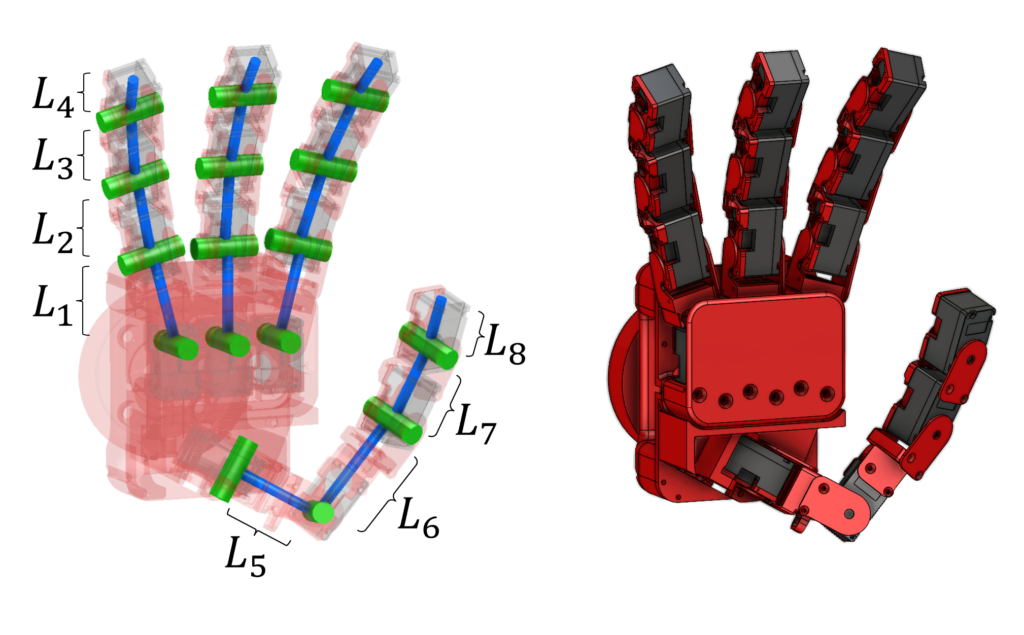
“Introducing H4ND: Hyper-resilient, 4-Fingered, Nimble, Dexterous Anthropomorphic Robot Hand Optimized for Research,” (UR 2024)
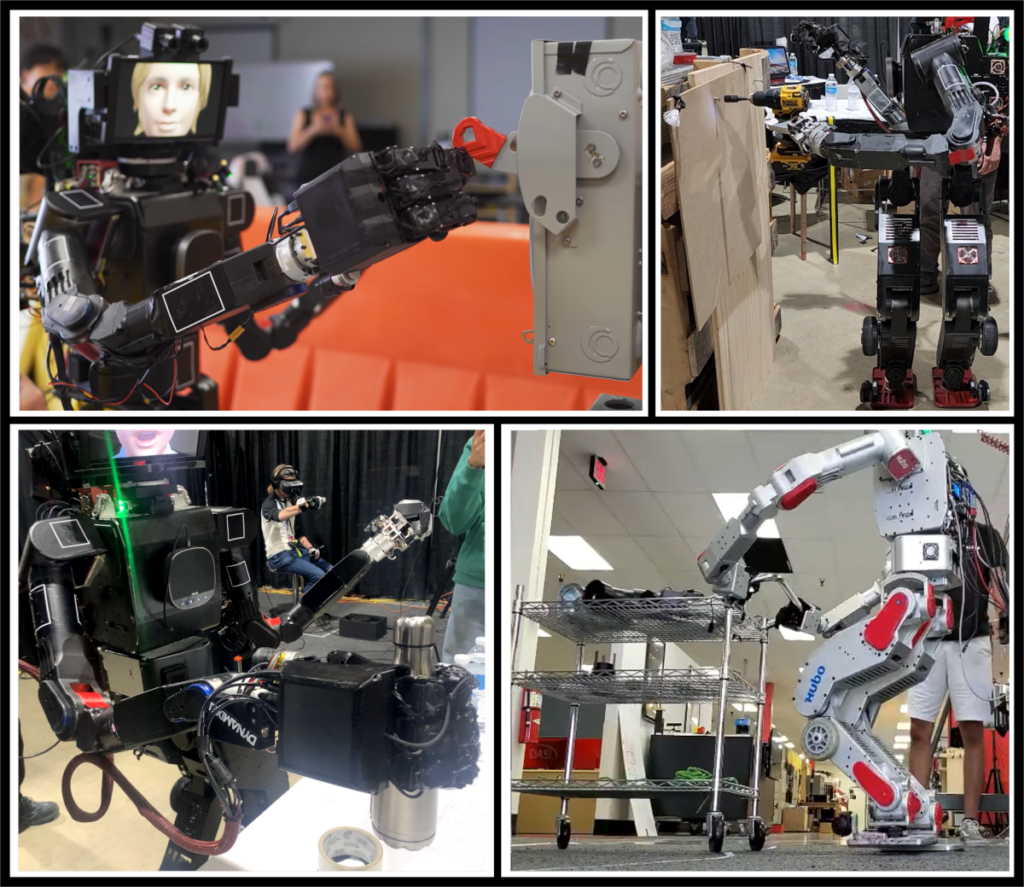
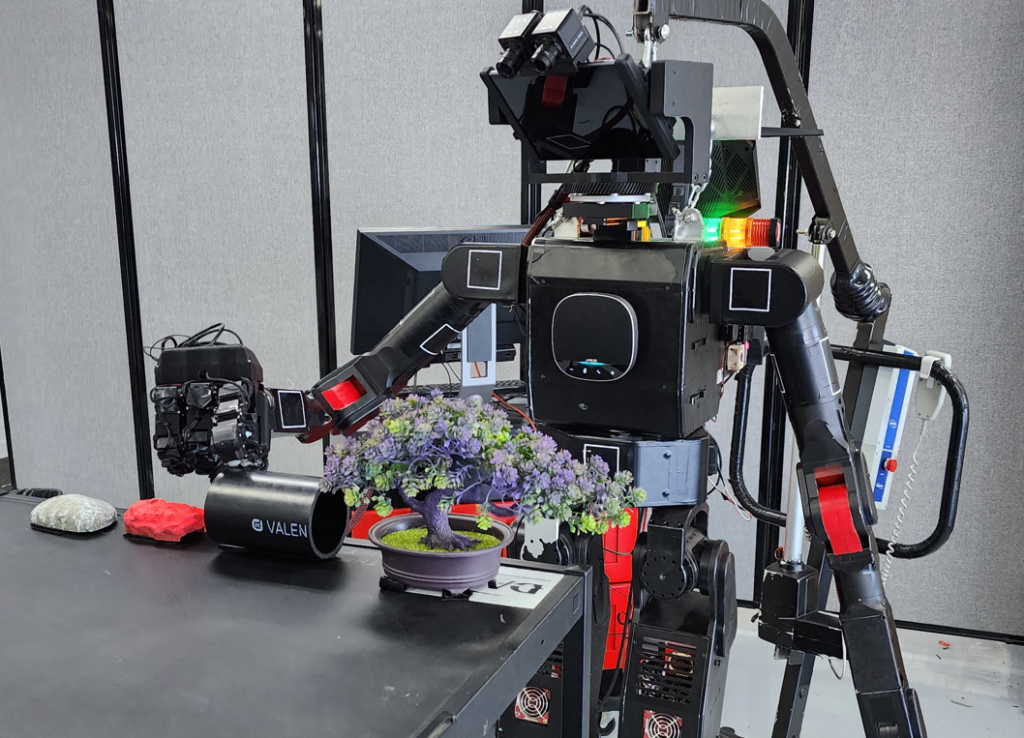
“ART: Avatar Robotics Telepresence—the future of humanoid material handling loco-manipulation.” (Jrnl of Intel Serv Robotics 2024)
[8] “Biomimetic Real-Time Multimodal Tactile Perception and Haptics for Telepresence Humanoids,” (ICAR 2023)
“Real-Time Joint Trajectory Optimization and Predictive Safety Filtering for Telepresence Avatar Robotics,” (ICAR 2023)