DOLA: The Dual-Armed Telemanipulator
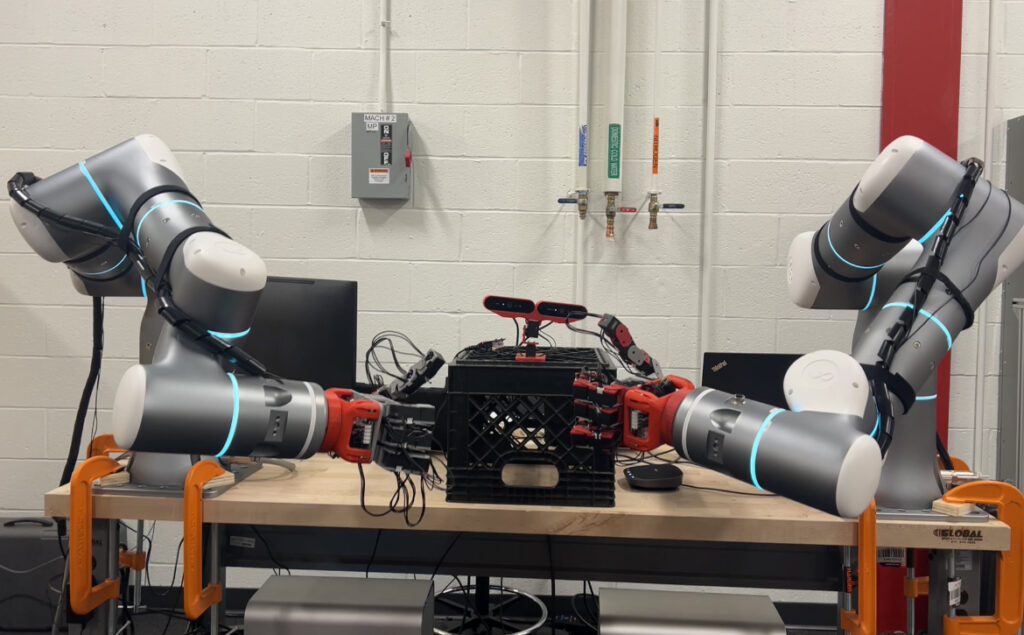
A robotic telepresence platform with two hands, binocular vision, and a vast suite of sensors. Here, we describe what was this system is made of, and what it can do.
Multi-Legged Robot Tele-locomotion
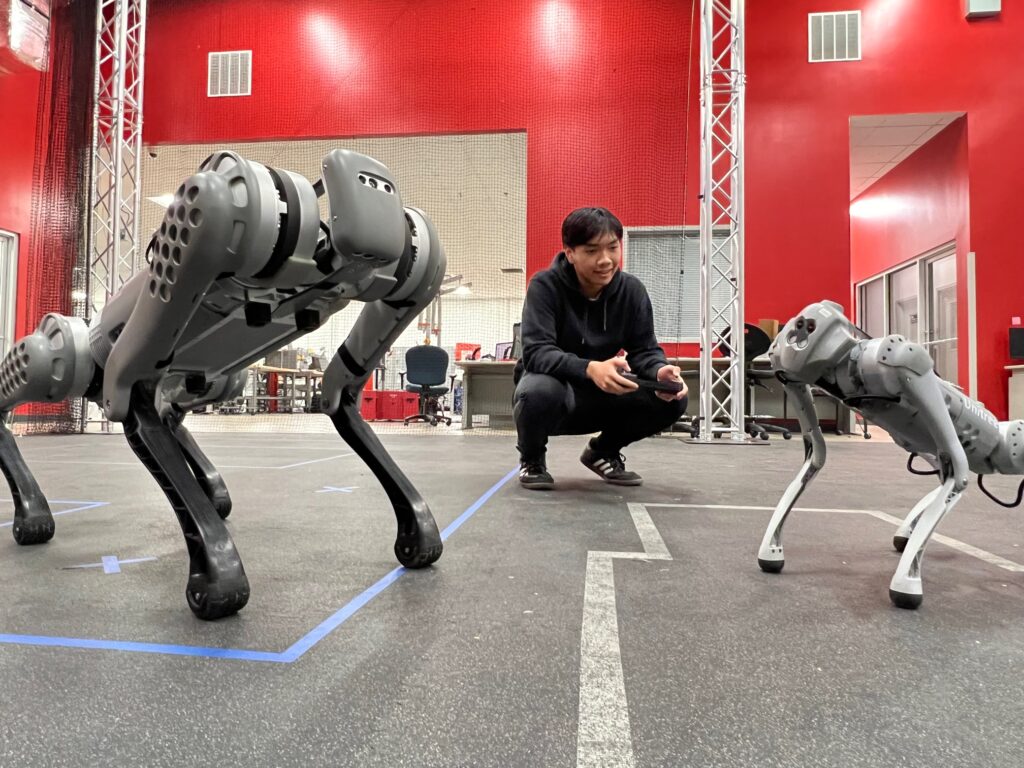
Here, we outline some of our strategies to simplify long-distance inspection and manipulation tasks through different quadruped robots.
“WhereVR”: A VR Teleoperation Framework for TIAGo

We created a VR teleoperation system using the TIAGo mobile manipulator to enable a distant human-in-the-loop to interact with the robot’s environment intuitively.
“Tele-OP3”: A VR Framework for Tele-Loco-Manipulation
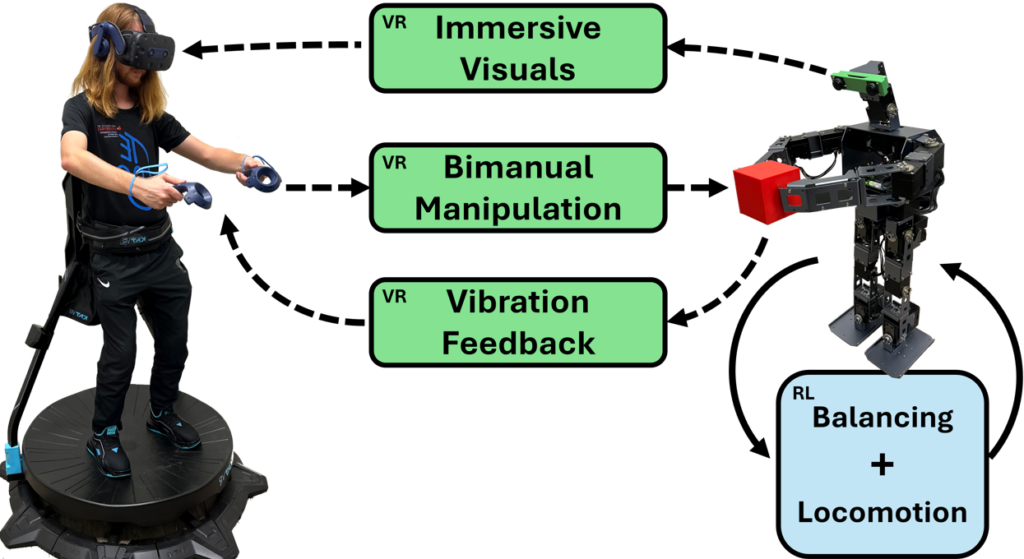
A VR miniature humanoid teleoperation locomotion and manipulation system, using a Robotis OP3 with a reinforcement learning locomotion policy.
“Hand-in-Hand”: Wearing Robotic Hands for 3D Force Feedback and Finger Tracking

A VR miniature humanoid teleoperation locomotion and manipulation system, using a Robotis OP3 with a reinforcement learning locomotion policy.